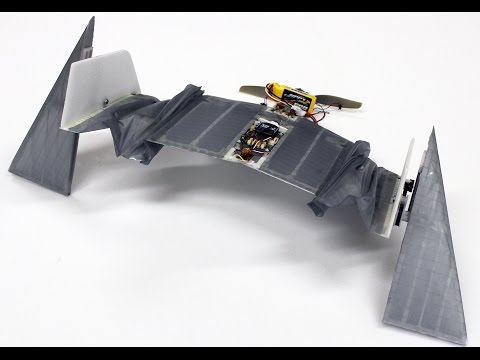
It’s difficult to design robots so they can walk on different types of terrain. But giving them two distinct modes of locomotion is even more complicated. That’s why it’s pretty amazing to see the Deployable Air-Land Exploration Robot (DALER) fly around, land, and start ambling about.
Created by researchers at three Swiss labs (LIS, EPFL, and NCCR Robotics), DALER’s design was inspired by vampire bats. The skeleton of the “wings” is covered in fabric, and on land they can serve as legs for walking. The goal is to use DALER for search-and-rescue missions in which the robot first surveys a scene from the air, and then lands to provide assistance.
The research, published in Bioinspiration and Biomimetics on Tuesday, takes advantage of the bat robot design concept by allowing the wings to partially fold in to create a smaller overall footprint, while also improving DALER’s walking ability. As Robohub points out, though, the wings were designed first, because flying is DALER’s primary functioning.
DALER is a ways off from actual deployment, especially because of its wobbly walking, but it’s another example of how effective it is to pull design ideas from real animals.